Communication and data transfer between every working part of a vehicle system is crucial for optimal functionality and proper management and monitoring of these parts. This is where the CAN Bus protocols come into play. These protocols are specialized in internal communication between various components of a vehicle.

Every vehicle has numerous devices, microcontrollers, systems, subsystems, and working parts that all work together to make the vehicle function properly. Each of these systems either works independently or in conjunction with other systems but one common factor between them is communication.
But how exactly do they work to affect communication within the vehicle?
In this article, we’ll provide a simple yet deep dive into the concepts of CAN Bus protocols in a vehicle.
What is a CAN Bus?
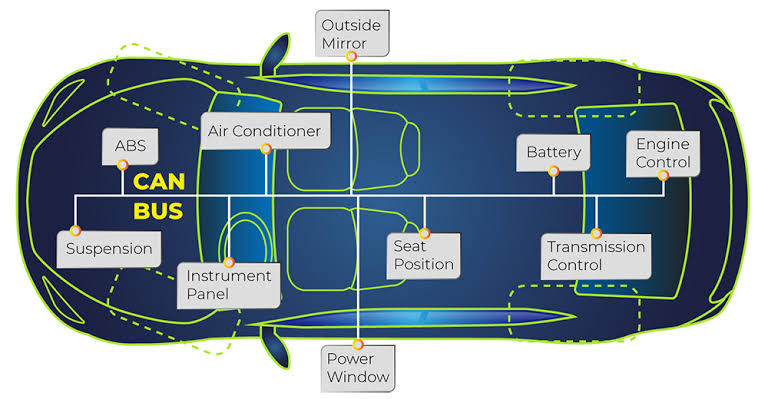
CAN Bus, which is short for Controller Area Network Bus, is a communication-based bus system designed to facilitate data transmission and communication between devices and microcontrollers independent of a host computer. Simply put, it is a message-based protocol that allows various smaller systems within a vehicle to communicate without physical connections or wiring.
The CAN bus can be designed to handle a wide range of microcontrollers and devices in such a dynamic way that during active data transfer, the device with the highest-rated priority is allowed to transmit data first while the others are transmitted sequentially.
A CAN Bus is a preferable option used by vehicle engineers for several reasons. One such reason is that a CAN Bus communicates data in real-time, is highly reliable, and is very effective in data transfer.
But CAN Bus is not the only option, you can learn more about other types of communication systems. Now, let’s take a look at sub-protocols.
What is a CAN Open System?
CAN Bus is a dynamic communications systems protocol that has many sub-protocols based on it, one major protocol is CAN Open.
CANopen is an application protocol based on a CAN Bus system that effectively allows CAN protocol to apply to a wide variety of applications. It is currently one of the most standard communication sub-protocols used by engineers for different applications in electric vehicles and other machines.
What is a CAN J1939 Protocol?
CAN J1939 is responsible for serial data transmission and communication between smaller devices, systems, and vehicle components. CAN J1939 is still gaining popularity with its use in modern electric vehicles and automobiles.
What is a CAN 2.0B Protocol?
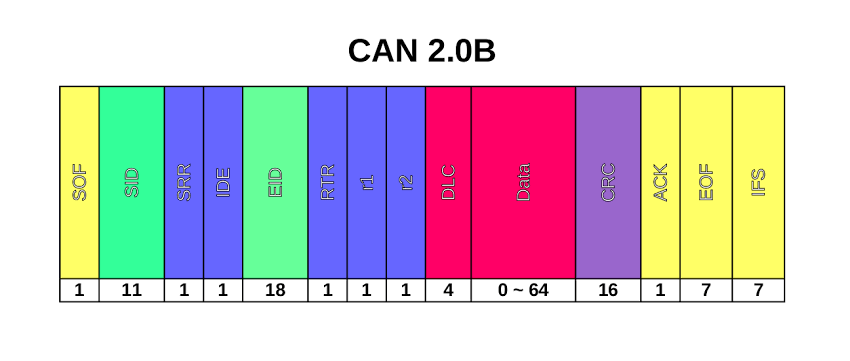
On the other hand, CAN 2.0B is simply a much broader format of CAN Bus communications and is an improvement of the original CAN 2.0A format.
CAN 2.0B format uses 29-bit identifiers in data communications as opposed to the 11-bit standard identifier used in the 2.0A model. It can use both 11-bit as well as 29-bit identifiers and Is much more advanced allowing compatible data communications between microsystems in a vehicle.
What are the Advantages and Disadvantages of a Can Bus?
Much like every component of a vehicle or any machine, the CAN Bus has its advantages and disadvantages all of which come into play to affect the overall performance of the vehicle.
Advantages of CAN Bus
- High-speed Communication: A CAN Bus protocol facilitates high-speed communication and data transfer between various components and devices within the vehicle. These components all need to work and communicate simultaneously for the vehicle to function properly and with the help of a CAN Bus, this communication is carried out at an exceptionally fast rate.
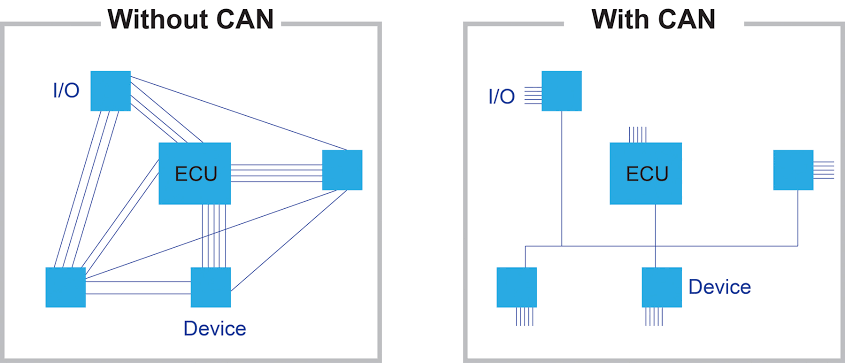
- Low Cost: With the advent of CAN Bus, there is no need for robust hard wiring and hence no need to purchase wires with a fraction of the cost needed to build and incorporate a CAN.
- Low Weight: A CAN protocol uses network communication to facilitate data transfer between components of the vehicle and hence doesn’t require a lot of hard-wired connections.
- Automatic Protocol System: As a software protocol, CAN Bus not only facilitates data transfer and communication through networking but also uses a high level of message sorting and retransmission between components and systems. A CAN protocol like CANopen can prioritize message and data transfer and in the event of weeks can retransmit delayed messages.
Disadvantages of CAN Bus
- High Cost of Software Maintenance: CAN Bus is a very technical protocol and however efficient it might be in internal communication, it is equally as technical to maintain. It requires specialist services to maintain the protocol and keep it functional and these specialist services are rare and expensive to procure.
- Occasional Signal Errors: Much like every other software protocol and program, CAN Bus is subject to the possibility of errors and problems with communication. This can greatly affect the overall performance of the vehicle as vital messages and signals from components might not be sent or received by the needed parts.
What are the Applications of a CAN Bus?
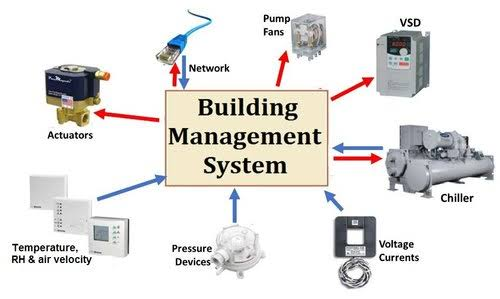
CAN Bus and CANopen protocols have been used in a wide range of applications, most especially in vehicles and machines that have numerous control units and systems. Each of these control units and subsystems forms larger units or works independently but still needs to be in constant communication with each other for the vehicle to function properly.
Systems include braking systems, autonomous driving, airbags, advanced driving assistance systems, steering, audio systems, recharging, BMS for batteries, etc. These communications facilitated by the CAN Bus and CANopen protocols promote a high level of coordination, safety, cost, and material reduction.
Some examples of systems that use CAN Bus protocols in a vehicle include:
1. Battery Management System (BMS): The battery pack of electric vehicles is the energy source that propels the vehicle forward and this battery system is in a constant state of energy transfer and needs to be monitored. This is where the BMS comes in, as it is designed to manage, maintain, and regulate the activities of the battery packs for optimal performance.
The battery management system on the other hand is designed based on CAN Bus protocols as it is involved in multiple aspects of the battery status and needs to be in constant communication with its components as well as the central computer that operates the vehicle.
A battery management system based on CAN Bus protocols helps manage the functionality of each battery cell contained in the battery pack. The battery management system monitors aspects of the battery like the voltage, current, state of charge (SOC), state of health (SOH), travel range offered by the battery, battery temperature, and a host of other parameters.
2. Electric Brake System: The CAN Bus is incorporated into the brake system of an electric vehicle such that it monitors the efficiency, quality, and state of the brakes, communicating that information to the central computer for the driver to read. These communications tell the driver how much power is being applied and how this power transfer affects the entire system.
3. Self-driving Parking Systems: The numerous cameras and sensors required and used by an electric car for self-driving and parking purposes need to be in constant communication.
4. Auto Start and Stop: Autostart features in an electric vehicle require communication with almost every subsystem in the vehicle, including systems like battery pack steering, speed sensors, air conditioning, and much more.
Smart batteries like lithium-ion batteries work a lot better with the transmission speed and control signals of a CAN Bus protocol to ensure vehicle stability much better than other batteries such as lead-acid batteries.
Why Do You Need a CAN Bus?
A CAN Bus is an essential part of modern-day vehicles, most especially electric vehicles which have a lot of electrical parts that need to be in constant communication with each other for optimal performance.
It is also essential in monitoring the battery pack of an electric vehicle through the use of a dedicated BMS device which is based on the CAN Bus protocols. The CAN Bus also reduced the need for excessive hard wiring allowing for s single dedicated wire connecting all the microcontrollers and devices.
Can You Replace a CAN Bus?

Simply put, Yes, a CAN Bus can be replaced. Seeing as how it is a bus with physical wiring, it can be purchased and replaced in the event of damage to the original model. The new CAN Bus needs to fit the requirements of the bus it is replacing to make sure it can carry out the functions and operations as the original bus.
Related articles:
- Technical information of e-bike battery charge and discharge characteristics
- Do you Need CAN UDS in Lithium Batteries?
- CANopen Protocol & Battery Management: Everything You Need to Know
- 4 Communication Protocols Commonly Used in BMS
- Tailored CAN Communication Speeds: Tritek’s Battery Management Systems


